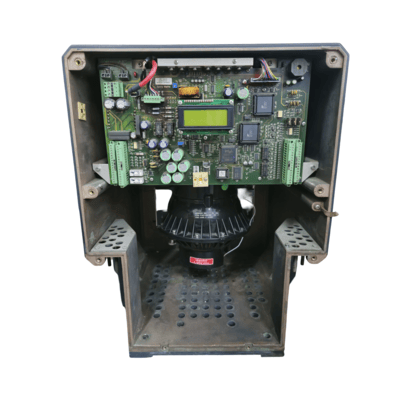
The Sperry Marine NAVIGAT X MK2 Gyrocompass is a highly accurate and reliable digital marine gyrocompass system designed to meet international carriage requirements for all types of vessels. Building upon the success of its predecessor, the NAVIGAT X MK1, it offers enhanced performance, durability, and ease of integration into modern bridge systems.
Technical Specification
Performance:
- Heading Accuracy:
- Static: ≤0.1∘ secant latitude
- Dynamic: ≤0.4∘ secant latitude
- Settle Point Error: ≤0.1∘ secant latitude
- Mean Settling Time: <3 hours (from cold start)
- North Stabilization during Power Interruptions: Up to 3 minutes (gyro remains north-stabilized within required accuracy)
- Follow-up Speed: Up to 100∘/sec
- Freedom of Roll and Pitch: ±40∘
- Mean Time Between Failures (MTBF): >40,000 hours
- Maintenance Intervals: 18 months
Power Supply:
- Main Power Supply: 24 VDC (Range: 18 VDC – 36 VDC)
- Backup Power Supply: 24 VDC (Range: 18 VDC – 36 VDC)
- Includes automatic switch-over in accordance with GMDSS rules.
- Power Consumption:
- Start-up: 80 W DC
- Operation: 45 W DC
- Each Analog Repeater: 7 W DC (or 8 W DC depending on source)
- Each Digital Repeater: 7 W DC
Data Interfaces (Inputs):
- Position: 1 input, IEC 61162-1
- Speed: 1 input, IEC 61162-1 or 200 pulses/nm
- Heading from Electronic Compass (e.g., Magnetic Compass): 1 input, IEC 61162-1
- Steering Mode Status: 1 input (Man/Auto from selector)
- External Heading Source Status: 1 input (Gyro/Mag from selector)
- Alarm Mute: 1 input from external control
Data Interfaces (Outputs):
- Analogue Repeater Outputs: Up to 4 outputs
- NMEA TTL Outputs: 4 outputs (typically for gyrocompass heading, magnetic compass heading*, rate of turn, heading reference status to compass repeaters). *Note: Magnetic compass heading if integrated.
- Sensor Data 1 RS 422: 1 output (gyrocompass heading, magnetic compass heading*, rate of turn, heading reference status, position*, speed*).
- Sensor Data 2 RS 422: 1 output (gyrocompass heading, magnetic compass heading*, rate of turn, heading reference status).
- Fast Output IEC 61162-1: 1 output (reduced dataset: gyrocompass heading, rate of turn, heading reference status).
- Superfast Output RS 422 (IEC 61162-1 or IEC 61162-2 selectable): 1 output (adjustable baudrate, max. 38400 baud: gyrocompass heading, rate of turn, heading reference status).
- Furuno AD10 Output: 1 output (gyrocompass heading).
- 6 Steps/Degree Output: 1 output (for heading).
- Analogue Rate-of-Turn Output: 1 output (selectable output of ±30,±90,±300∘/min or customized from ±0.1 to 999.9mV/∘/min; ±10V,10mA max.).
- Alarm Signals (Relay):
- 1 relay for power failure / general device error
- 1 relay for heading difference alarm
Physical and Environmental:
- Dimensions (Approximate):
- Width: 404 mm (15.9 inches)
- Height: 520 mm (20.5 inches)
- Depth: 420 mm (16.5 inches)
- Weight:
- Typically listed as 21 kg (46.3 lbs)
- Some sources may state 25 kg (55.1 lbs)
- Operating Temperature: −10∘C to +55∘C
- Storage Temperature: (Typically wider range than operating)
- Protection Grade: IP 23 (according to IEC 60529/DIN 40050)
- Magnetic Clearance: 0.6 m to standard magnetic compass
Compliance and Approvals:
- IMO Regulations: A.424(XI), A.694(17)
- ISO Standard: 8728
- Type Approval: Wheelmark (MED 96/98/EC), Germanischer Lloyd (GL)
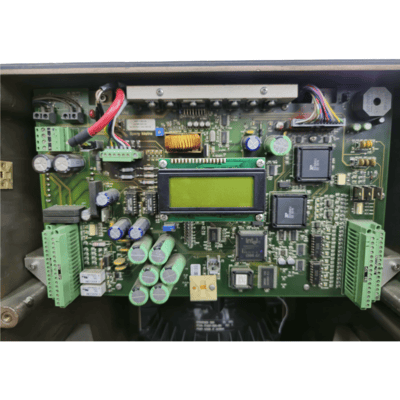
Additional Features:
- Automatic North Speed Error Correction: Integrated, no external unit required.
- Electronic Alignment Error Correction: ±180∘ (in setup program, no mechanical correction needed).
- Digital Heading Measurement: 13-bit absolute value using a digital shaft encoder.
- Monitoring and Alarms: For supply voltages, gyroscope current, follow-up system.
- Permanent Data Storage: Operational data (gyrosphere current, temperature, elapsed operation time).




































There are no reviews yet.