No products in the cart.



$1,200.00Earn 1,200 points!
1 in stock
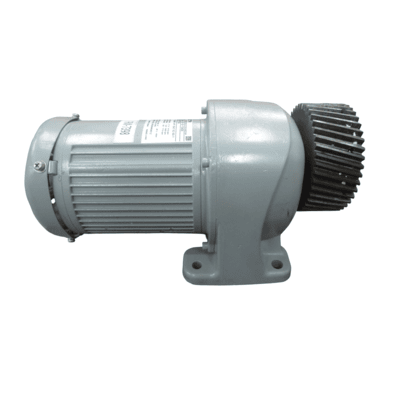
This unit is the main 3-phase power motor and gearbox assembly used to drive the radar scanner of the Furuno FAR-2837S radar. It takes 3-phase AC power and, through a precision gearbox, turns the radar pedestal at a steady rotation speed required for proper antenna scanning and signal performance.
Marine Navigation Radar
– Furuno FAR-2837S series
– Suitable for commercial and large recreational vessels
– Provides continuous, smooth rotation for the radar scanner
Radar Scanning Mechanism
– Works with the radar pedestal and slip ring assembly
– Controlled by the radar’s servo drive electronics
Power Source:
– 3-phase AC power from the radar’s internal power supply / servo drive
– Frequency typically matches radar system design (e.g., 400 Hz or 50/60 Hz depending on radar PSU)
Function:
– Converts electrical energy to mechanical rotational motion
– Gearbox reduces high motor speed to a stable low RPM suited for radar rotation (e.g., ~24–28 RPM typical)
Control:
– Motor is driven via a servo drive / inverter inside the radar
– Feedback signals (encoder or resolver) may be used for closed-loop speed control
Note: Exact values depend on the precise model and radar variant. Below reflects typical servo motor characteristics used in marine radar scanners.
| Attribute | Typical Value / Description |
|---|---|
| Motor Type | 3-Phase AC Servo / Induction Motor |
| Rated Power | 0.2 kW – 1.0 kW range (for scanner rotation) |
| Rated Voltage | 200 V – 240 V AC (system dependent) |
| Rated Frequency | 50/60 Hz or high frequency inverter supply |
| Rotation Speed (Motor) | High RPM (~1000–3000 RPM) |
| Output Speed (Gearbox) | Low RPM (~20–30 RPM for scanner rotation) |
| Gear Ratio | High reduction ratio to suit stable scanning |
| Duty Rating | Continuous duty (24/7 operation) |
| Cooling | Natural convection / enclosed design |
| Characteristic | Detail |
|---|---|
| Housing | Enclosed steel / aluminum casting |
| Shaft | Geared output shaft to radar pedestal |
| Mounting | Direct to radar pedestal base |
| Encoder / Feedback | Integrated or coupled encoder or resolver for control |
| Bearings | Marine-graded sealed bearings |
| Condition | Typical Range |
|---|---|
| Operating Temperature | -15 °C to +55 °C |
| Humidity | Up to 95 % non-condensing |
| Vibration / Shock | Engineered for vessel vibration |
| Salt Spray / Corrosion | Marine environment compatible |


































There are no reviews yet.